polycentric linear city:
a
Prototype for a Transit-based human settlement
PLC is a prototype for a
polycentric corridor growth strategy developed strictly around a
transit-based intermodal transportation network. Highly
interconnected within urban spaces, station areas provide such high levels of
accessibility that the need
for auto use and ownership in area around its nodes would largely be
eliminated. It is not meant to be implemented in its actual form, rather provide
a performance benchmark to guide its application to existing
conditions/opportunities. I will describe its major
components, requirements and benefits.
|
Color
|
Name
|
Description
|
|
|
Mainline
Transit
|
Fully
automated line-haul transit.
|
|
|
Feeder
Transit
|
APM and/or
small-vehicle zero-emission
guided busway (automated).
|
|
|
Jitney
Feeder Transit
|
Guideway-compatible zero-emission bus
|
|
|
Roads
|
Highway and
arterial roads.
|
|
|
Residential
District
|
Residential
"oasis", medium/low density, school, retail/services.
Auto-free.
|
|
|
Key
District
|
Mostly
retail and services, high-density. Auto-free.
|
|
|
Office
District
|
Mostly
high-valued services, office, high density. Auto/transit transfer
hub.
|
|
|
Hub
District
|
Off-line
Intermodal facility, manufacturing, warehouse.
|
BACKGROUND
Originally, cities came about
to join people, to enhance their security, to favor the exchange of goods,
information and emotions; to eventually expand their individual selves into a wider social conscience.
In recent decades, this web of relations
has been dilated and lacerated by networks of highways and streets. By expanding
and dispersing the flow of people and goods, the vitality of local
communities has been traded for increased regional mobility.
I believe that a transit-based
transportation and land use revolution is mature and that it would largely
contribute to the solution of those problems; this will allow for the creation of
striking and unprecedented new
solutions to human settlements.. It is my belief these new corridor-based urban
growth strategy will disproof many wrong assumptions
about the inevitable deficiencies of social coexistence.
All over the world, the automobile has completely and
pervasively reshaped the urban form, by conforming it to its needs. The unrelenting
desire for the freedom, convenience and flexibility that the auto brings have
largely overridden other concerns about the quality of urban life. With no end in
sight to the increase in car ownership and use, the accommodation of auto
mobility directly requires an ever larger share of urban space and economic resources.
Its high personal and public costs are degrading urban amenities, community quality, local accessibility, air
quality, personal safety, social benefits, and therefore,
sustainable regional land values and sustainable regional economic growth.
Regardless, its benefits are still perceived to justify
these high costs. Through their daily choices and through political and
ballot votes, urbanites confirm their readiness to pay the price
because the total opportunity
cost of known alternatives
to auto-based development is much higher: perceived
alternatives provide much less freedom to participate in desired activities
and , therefore, less personal freedom and economic opportunities.
A car allows me to go where I want, when I want;
it allows me to choose among a great variety of providers of goods, services,
employment and entertainment. As a business, it places me in close reach of
potential employees, suppliers, clients and supporting businesses.
Reliance on transit, pedestrian and bicycle, instead,
greatly limits this freedom of movement because of their short ranges, low speed,
and/or limited destinations. Except for a few subway systems in very high density
metros, they do not offer anywhere near the choice and speed offered by the
auto.
In this paper I am going to challenge all these
preconceptions as outdated and inappropriate by describing a new alternative.
In fact, recent advances in transit and information technology, the
advent of intermodal planning, new land-use planning concepts and new evidence
of successful non-auto urban forms around the world can be combined to create a prototype for an extremely efficient
and equitable new urban form.
NEW TRANSIT TECHNOLOGIES
Many high density large metropolises in the world (Cervero,
1999) have extensive and
intensive rapid transit networks, mainly underground, that act as primary and in
some case the only
mode of transportation for a majority of people living along their routes. In
those cities, congestion and high parking costs so diminish the benefits of
auto use that millions of people decides not to own one. These transit systems had to be
combined through very dense
neighborhoods because only a very high ridership could justify the operational
costs of manual frequent service, and had to be kept underground or separated
from buildings because of their
noise, vibrations and structural requirements.
Recent advances in transit technology, however, suggest that
transit could again determine urban growth, shape urban form and help create
highly enjoyable urban environments. In particular, a number of implemented fully-automated transit
technologies have proved the following:
-
Very
high frequency of service, both peak and off-peak, without the high operation
costs typically associated.
-
The ability to operate at very low levels of noise and
vibrations, both internal and external.
-
The ability to perform safely and efficiently in fully
automated control and operation.
-
Ability to effectively operate small vehicles and
single-vehicle trains.
-
Extremely good safety records.
-
Cost efficient use of non-polluting and silent
propulsion technologies.
-
Comparatively low capital and operational costs.
Fully automated small transit vehicles can operate at
frequencies of up to 60 vehicles/hour without the typical high labor and energy
costs associated with manually operated systems (labor generally accounts for
80% of operating costs). These frequency levels would
allow for very high accessibility even for medium density areas.
Extremely low levels of noise and vibration permit the
integration of transit stations and transfer platforms within building
structures, with the potential of dramatically increasing the accessibility to
land adjacent uses and facilitating transfers to other surface transit
systems. Also, guideways can be built above ground and in proximity of most
land uses.
Single small-vehicle trains are much lighter than typical
multiple large-vehicle trains allowing for cheaper and smaller guideway
structures.
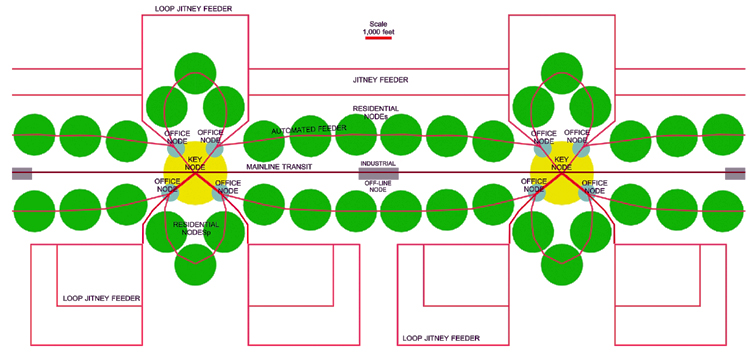
Description of Polycentric linear city
I will here describe PLC as a prototype of an evolving urban form
as it would appear at a specific stage of maturity.
In PLC, land uses types and intensities are strategically distributed around hierarchical transit/intermodal nodes to
create clustering districts of development, a very efficient use of transportation
infrastructure and comparatively extensive and inexpensive access to desired activities. This
creates opportunities for highly
connected communities strongly focused around a compact nodes. This nodes
integrate public space,
transportation hub and green areas.
The transportation system will consist of a highly
coordinated intermodal network that walking,
bicycling, rental-auto, owned-auto, rail, e-vehicles, air and truck modes,
through the structural skeleton of its mainline and feeder transit modes.
The relationship, relative importance and hierarchical order of modes
would vary widely in space. All intermodal combinations can possibly be chosen
by a user from
any location; however, their relative convenience will greatly vary depending on the
location of origin and destinations of his trip/tour respect to transit node.
As shown in the chart below, the modal split associated with a location along the
corridor would therefore be highly related to its distance from the transit
nodes.
Essential to the viability of the prototype is the
definition of very extensive auto-access and parking restrictions within the
core areas of certain districts (key and residential nodes) and the provision of
highly spatially integrated park-and-ride facilities at other stations (office nodes).
|
residential
District
Characteristics
|
Distance
from station (feet)
|
|
0-200
|
200-400
|
400-600
|
600-800
|
800-1400
|
|
Auto
access
|
No
|
no
|
no-restr.
|
restricted
|
Yes
|
|
Adjacent Parking/HH
|
0
|
0
|
0-0.2
|
0-0.8
|
1.0
|
|
Residential Density(DU/acre)
|
45-90
|
35-60
|
20-45
|
15-30
|
10-25
|
These special
districts are defined with precise sizes and characteristics for the sake of
explanation. In an actual implementation, sizes and characteristics of each
district type would vary according to existing topology, nodes service levels street patterns and
developments. Also, these districts do not define continuous self-contained
units, as much
as defining the gradual tapering of essential characteristics with distance from transit nodes. They could be considered as a
sort of contour lines of urban
characteristics:
Following is a chart describing approximate average values
for main
land use components of PLC:
|
District
types
|
Area
|
Population
|
Res. Units
|
Res.Density
|
Workers
|
Jobs
|
|
|
acres
|
#
|
#
|
DU / acres
|
#
|
#
|
|
Key District
|
83
|
2400
|
1600
|
20
|
960
|
3700
|
|
Office District
|
25
|
600
|
400
|
16
|
240
|
3200
|
|
Res. District
|
38
|
5000
|
1700
|
44
|
2000
|
300
|
CRITERIA FOR PROTOTYPE IMPLEMENTATIONS
This corridor growth strategy can be overlaid over existing
metropolises or cities of over one million in a variety of ways to accommodate, stimulate
or direct regional growth:
-
As a linear development linking opposite sub-centers
through the CBD.
-
As a radial corridor development strategy through existing
auto-based developments
-
As an overlay on existing transit corridor
-
As a new transit beltway
linking major sub-centers.
-
As a comprehensive new corridor development plan through
mainly greenfield sites.
-
As a combination of any of the above.
key regional factors
A extensive review of successful
"transit-friendly" human settlements around the world has revealed one common
characteristic: land
constraints. Either by topography or by governmental policy. all those regions had
or have severe limitation to the availability of
cheap developable land.
Also, crucial is the location of the corridor and its nodes
respect to existing and future major regional destinations, transportation hubs, employment
centers.
For these reasons, we are going to assume that the nodes of
the mainline system connect existing major sub-centers (malls and office parks), the CBD, a high
volume inter-regional and commuter rail station, a major truck freight loading
facility, and maybe ends at a major international airport. Especially the end
of lines should be high volume destinations, such as an airport or a downtown.
The environmental impact of the mainline guideway should be
minimized by aligning along freeways, existing or abandoned rail ROW, or low-density developments.
Selection factors would include the following:
n
Existing clusters of commercial and service activities at Key Node sites,
especially at ends of lines.
n
High projected
demographic growth in the region and/or potential for growth within study area.
n
Mostly low and middle
income residents, preferably immigrants with inclination toward public space
and mass transport.
n
Linearity of existing
natural geographic boundaries and/or existing regional development (such as
along the coast of South Florida).
n
High Regional Land
Values and/or scarcity of developable land.
n
Flat or highly
mountainous site area to maximize respectively bicycling or transit.
n
Proximity or adjacency
to valuable environmental features (such as park space, seacoast, riverside,
etc.).
n
Existing and available
rights-of way segments: operating rail, abandoned rail, and highway.
n
Proximity of office
nodes to highway exits and interchanges.
n
Existence, within
0.5-1 mile from the alignment of medium or high-density residential
developments or large green-field sites.
PLC TRANSIT TECHNOLOGY
PLC PERFORMANCE REQUIREMENTS
Extremely high
quality transit systems, and a high spatial and temporal integration and
coordination between transit, walking, bicycling, E-vehicles, auto and freight
are essential to the success of the strategy.
Both mainline and feeder service should score very high in the following
performance measures to provide the accessibility, comfort and convenience
needed to outpace the automobile:
-
Frequency of Service
-
Visual Impact
-
Efficiency of transfers
-
Ride comfort
-
Noise & Vibration
-
Average Loading Time
Frequency of Service: Usually measured
in vehicles/trains per hour. It has traditionally been restrained by available capital
and operating financial resources, as well as by system engineering
limitations. Today, those restrains have been largely overcome. Major factors are: system labor intensity, marginal cost per
additional vehicle/mile, minimum size of vehicles in the fleet, minimum safety
delay between trains (0.10-6 min.), minimum vehicle stand-by time (20-90
seconds), minimum train size (1-4 cars per train),
Using small vehicles/trains, a number of urban scale automated systems around the world
operate at frequencies of 30-60 trains/hr in low and medium density areas.
plc-Mainline:
Full automation allows the mainline system to perform at 60 trains/hr during
peak hour and 20-45 t/hr during off-peak and night periods. Minimum train size
is one small vehicles (30-50 pp.). Approximate stand-by time is 15-30 seconds.
Minimum safety delay can easily be set at 60-80 seconds, but it could be further
reduced when improved accessibility justifies the extra costs of better
controls.
plc-Feeder:
Whether it is automated or manual, fully grade-separated or with mixed-grade
sections, it has to be of very high quality and frequency, and be extensively
upgradeable in service level. In tha case of initial manual operation, the
frequency would initially be restricted by labor costs; the latter should be
heavily cross-subsidized until automation is incorporated to spur real estate
development.
Efficiency of Transfers: It defines the
amount of time needed to transfer from one mode to the other. It is especially
important in a transportation network where a large number of trips involve
multiple modes, since transfer waiting-time is generally perceived by travelers
as 2-3 times longer than actual travel time. Major factors affecting efficiency of
transfer between two modes are frequency of modes, schedule synchronization,
intermodal facility design and traveler information.
PLC:
Scheduling of mainline and feeder service are synchronized according to
real-time vehicle location information and remote traffic light control to
achieve temporal coordination. Intermodal transfer facilities
should be integrated in a single 3d dimensional structure within a major
activity center. Improved frequency of both feeder and mainline greatly hugely
decreases typical transfer time.
Ride Comfort: A transit ride can be more or
less enjoyable. Important factors are: vehicle design, strength and smoothness
of acceleration/braking, internal noise, internal vibrations, crowding level,
seating vs. standing capacity, exterior views, vehicle amenities, cleanliness,
air quality, lighting.
plc-Mainline:
automated propulsion controls allow for smoother acceleration and deceleration. Mostly
elevated and at-grade routing provides opportunities for pleasurable exterior
views and direct integration into valuable land developments. Interior and
exterior design and lighting will be carefully designed. A relatively small additional
investment in vehicle design and amenities could provide a high return in terms
of a pleasurable ride.
plc-Feeder: A number of current APM technologies have proven smooth acceleration/braking and very low
noise levels, because of no gear switching. Engine would produce no noise
(Trans21, 1999). In
mixed-grade systems, new low-floor design eases boarding increases
traffic maneuverability. Given that feeder routes would be assigned
permanently, their street surfaces should be carefully re-paved to provide for
a smooth ride. Extensive use of traffic preemption/prioritization avoids stops
at traffic light and largely limits queuing in traffic.
Noise and Vibration Levels:
The resulting discomfort a matter of intensity and frequency of noise, as well as quality; in
fact, certain sounds and sound patterns are perceived as more or less annoying
based of their quality as well. As far as noise intensity, it can vary
among transit systems from near silence (0-10dB) for Low-Speed maglev and rubber-tired linear induction
systems, up to noisy (60-70dB) for diesel bus and old steel-wheel commuter
rail. New steel or alloy wheels are much quieter, especially at low speeds and
curvature levels, which are typical in proximity of station areas.At medium and low speeds, noise of the system is a function of
suspension/guidance interaction, vehicle engineering, propulsion and AC noise,
guideway insulation and structural separation.
Vehicle Loading Speed: It is a function
of floor level, doors size, vehicle stand-by time, eventual ticketing
interface. It can vary between 15-90 seconds. Both small train size and high
frequency have great effect in reducing loading speed. Small trains with means
less passengers that could somehow delay dwell-time; high frequency means that
missing a train would not be a be deal. (See how guideway can integrate into
entertainment and retail development in Buenos Aires "Le
Rosedal")
Visual Impact: It is a function of
vehicle size and design, station design, guideway size and design, level of
visibility of guideway, frequency of service, level of spatial integration
within existing developments.
.....
selection of TRANSIT TECHNOLOGIES
Mainline System
Given the identified need for very frequent service at all
times of day the choice falls on some kind of automated guideway system with
small and medium size trains.
Automation controls have recently been applied to a number
of previously manually operated systems, and currently in San Francisco's BART.
......Larry data .....urban scale AGT.......Several implemented systems around the world comply with a
number of these performance measures. Therefore, an
analysis of those existing systems and the current developments of their
manufacturers should give us an idea about the feasibility, expected costs and
actual performance of such system.
Those systems are:
- Meteor
Subway Line. Paris, France.
- Vancouver
Skytrain. Vancouver, CA.
- VAL
AGT system. Lille, France.
(See attached data charts on some
AGT systems by Dr. Fang Zhao at FIU).
Feeder System
High frequency at peak and off-peak periods is even
more critical to a successful feeder system. Operating speed and frequency of
the feeder system should approach the levels of the mainline system. In fact, on
average, PLC residents' daily tours would involve more feeder system trips than
mainline ones; therefore, its frequency should be even higher than mainline. To support the costs of a very frequent and fast automated feeder
system, the land around its stations should
concurrently and very extensively be developed or re-developed. I have
identified two transit modes that could satisfy this performance requirements:
1.Evolving Automated Guided Bus: Given the
necessary phasing in the development of large transit-oriented development around
stations, an "evolving" transportation mode would allow for the
efficiency of transit to grow with the size and type of the real estate developments.
While frequency is maintained relatively high
throughout development stages, an initial manually operated mode is
progressively transformed in a driver-less grade-separated system integrated with new real
estate developments.
A large fleet of low-floor non-polluting small size buses
(electric, fuel cell or hybrid) would operate on mixed-grade at a very high frequency. It would
incorporate a combination of signal preemption, remote prioritization and
remote vehicle location technologies to provide a frequent and highly
synchronized feeding service to the mainline AGT system. Initially, the
frequency of the service would be greatly limited by the manual operating costs.
Relatively high frequency should be cross-subsidized even during this
initial phase to create the conditions for district development.
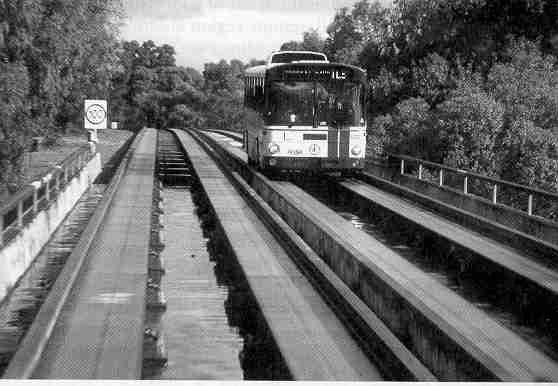
All feeder buses, as in Adelaide, should have built-in
special guiding lateral wheels and electric controls.
Guided Busways are currently operating in Adelaide,
Australia, (see Fig. 5a
& 5b)and Fukuoka, Japan, and currently under development in Paris, France.
The choice of guided-busway technology allows for the
operation of the same vehicle in driver-less mode on separated-ROW, as well as
manual control on mixed-ROW; therefore, some feeder vehicles could be manually
operated at lower frequencies
through auto-based neighborhood, then switch to automated controls as it enters
the Office node and Continue to the Key node.(...image...)
In fact, The system in Adelaide is currently manually
operated, though it is "predisposed" for control automation
The non-polluting
technology, among other benefits, would allow the critical spatial integration
of the feeder system, mainline system and real estate developments.
This system should be developed in such a way that future
grade-separation and control automation could be implemented at a later
stage, when increasing building densities of feeder nodes would justify the
integration of a new
guideway to improve speed and frequency. Developments should reserve space for
future guideway
The short range of the batteries would no t be an issue
because routes are very short; battery could be periodically replaced at key
district stations.
Fuel-cell buses are currently operating in a number of
cities including Vancouver and Los Angeles. Diesel-electric hybrid propulsion
buses are currently operating in Seattle.
To allow for tighter integration within building structures,
mechanical guiding wheels could be installed to permit operation in very small
guideways or tunnels. This would also facilitate future automation of the
system.
Electric battery-powered low-floor mini-buses are currently operating
in many European cities, including Rome.
Mainline and feeder systems should be highly integrated in space
and time. The temporal integration would be achieved through high frequency of
service, real-time schedule coordination. Spatial integration is assured by the
design of intermodal exchange facilities that minimize transfer time.
1.Automated People Mover (APM):
........
Freight within plc
Freight handling for residents and companies in auto-free areas of the
corridor would also be integrated in the transit system.
It would serve these areas in 2 main ways:
·
Items would arrive through truck at office nodes; or
through railroad and air at key nodes; then it would be dispatched through the mainline and feeder
systems on specially equipped vehicles along with passenger train sets. Items
would then be debarked at the station closest to its destination and delivered
through small electric vehicles to the final destination.
·
Items would arrive through truck at an "offline
Industrial stations" placed in between Key stations of the mainline system;
then, either delivered to their final destination in residential, key
or office districts through small e-vehicles or loaded on mainline vehicles for
delivery to key nodes.
Economies of scale are going to be essential for this
service to be implemented profitably by public or private companies. Key and
residential districts with a few thousands employees and/or residents should
support at least one full-time freight handler. priority mail and freight,
Except for high priority mail, most freight would utilize
excess transit system capacity in night and off-peak periods. It is conceivable
that the a number of vehicles be used for passenger during the day and for
light freight at night.
Spatial-Temporal Integration
Essential to the success of the strategy are high
spatial/temporal integration and coordination between the two transit modes and
all other modes. In economic jargon, the personal utility of being in a place varies
enormously through time; therefore the integration should strictly be
spatial/temporal.
Spatial integration
A very high spatial integration of mainline system, feeder
system and station area developments is essential to reinforce the benefits of
high temporal integration.
All three elements should be integrated spatially, visually
and functionally to maximize the accessibility of station area activities by
residents and transit riders. Bicycle storage/lockers/rental facilities should be available
at many stations, especially if weather, topography and local culture are favorable to
bicycling. For bicycle rental, regular stored-value transit passes would be used;
the rental-bicycle value would be temporarily charged to the card and refunded
at the return location. Rentals might include new electric-bicycles. Many
similar systems are in use in Japan and northern Europe. Daily and hourly auto and station-car rental should be
offered at most office districts' parking structures. These would allow PLC residents to conveniently access auto-based
developments, their services, and to enjoy weekend rides.
teMPORAL INtegration
Temporal integration, essential to feeder and mainline
modes, is achieved through high frequency, high maximum speed, remote vehicle location, remote management of traffic
light preemption/prioritization (for mixed-grade feeder), real-time schedule coordination. These
technologies are rapidly becoming cheaper and more powerful.
A remote control center elaborates real-time information on
the position of each transit vehicle, compares it to the optimal on-schedule
position, and accordingly control the synchronization of lights at intersections. The
control center can, therefore, adjust traffic lights phasing and communicate
desired speed adjustments to drivers or in-vehicle controls, to make up for any delays.
Each of these technologies is currently implemented in
several European and American cities.
Also, given the short length (0.5-1 mile) of mix-grade feeder
system routes, any delay would hardly accumulate to become significant.
Essential to the temporal integration is, again,
frequency; for the mainline it is both feasible and cost effective because of control automation
(see data on ................Vancouver Skytrain).
For the feeder system, instead, a high frequency would mean fairly high labor and operation costs because of manual operation
(at list during the first phase).
In both cases, the cost effectiveness of high frequency service
is highly dependent on the density and type of land developments that are within
station areas. The latter should create a demand for service that is
strong di-directional demand throughout the day, and therefore make the best use
of transportation infrastructure and staff.
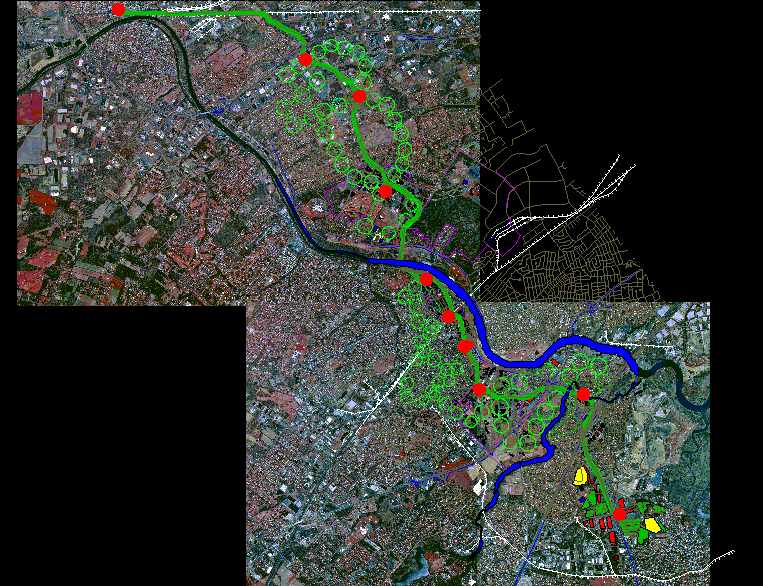
Financing & Implementation
Please, refer to the following proposal for a New Jersey Linear City, or a
highly integrated transport/real-estate development running east-west through
Midtown Manhattan: http://www.linearcity.org/rufo/nj-plc06.htm.
The plan is shaped around a transit-based intermodal transportation network that
would utilize existing highway rights-of-way and rail tracks, as well as new
tunneling to link Morris-Essex commuter rail to most NYC subway lines, Grand
Central Station and the planned 2nd Avenue subway.
The realization of such an ambitious and broad plan surely requires an elaborate and complex public-private financing and
decisional organizational structure. However, cities and metropolises have
realized highly successful transit-based human settlements through very
different, and even contradictory, public-private organizational structures
(Cervero,99).
For example, in Tokyo great conglomerates have been given freedom of building
extensive transit-based developments on their own, whereas in Zurich similar
success has been achieved through numerous incremental ballot box votes.
Regional institutions would be ideal at coordinating the
plan; however, that can also be realized by State or Local. Consortiums of
developers, Real Estate Investment Trusts and Public-Private Joint development
agencies could be major players.
I
LEGAL ISSUES
Please, refer to the following document on legal issues involving large-scale
corridor-wide transit-oriented developements: http://www.linearcity.org/rufo/Lyna-final01.htm.
Phasing & Construction
The high interdependency of mainline system, feeder system
and real estate developments require that the phasing be somewhat concurrent.
Both transit and real-estate infrastructure of the plan should be developed as extensively as possible given market demand;
only this would quickly achieve the critical mass of transport and
development that will start multiplying returns and drive further developments.
Initial transportation and real estate development should be in balance between
self-sustenance and flexibility for future expansion.
Substantial guarantees on construction times, especially concerning transit
infrastructure, are going to be essential for all private players involved, and
would highly affect their willingness to participate.
Critical Mass is
going the most important factor of success. Only a fast, efficient and
extensive network will bring real estate development. Only intensive
developments at some nodes will bring other developments at other nodes. Only
high density around nodes will bring the ridership levels that would justify
the costs of a super-high quality transit network.
Selected Bibliography
·
Ben-Akiva, Moshe and Bowman L. John. Activity Based Travel
Forecasting.Activity-based Travel Forecasting Conference.Wash., DC: DOT.
·
Ben-Akiva, Moshe and Bowman L. John. The day activity
Schedule approach to travel demand analysis. Wash., DC: TRB annual meeting
1998.
·
Bhat
R.C., and F.S. Koppelmann. A retrospective and Prospective Survey of Time-use
Research. Northwestern University. (#990830).
·
Bhat R.C., J.P. Carini and R. Misra. On modeling the
Generation and Organization of Household Activity Stops. TRB Annual Meeting,
1999.
·
Cervero, Robert. The Transit Metropolis. Washington,
DC: Island Press, 1998.
·
Shen D., Huang J. and Zhao Fang. Automated People Mover
Applications: a worldwide review. Washington, DC. : National Urban Transit
Institute.
·
Warren, Roxanne. The urban oasis. McGraw Hill, 1997
·
Miller,
J. Harvey. Measuring space-time accessibility benefits within transportation
networks: basic theory and computational procedures. Geographical Analysis,
April 1999.
·
Zhang
M., Q. Shen and J. Susssman. Strategies to improve job accessibility- a case
study of Tren Urbano in San Juan Metropolitan Region. 1998.
·
Niles
J. and D. Nelson. Measuring the success of Transit-oriented Development: retail
market dynamics and other key determinants. APA National Planning Conference,
1999.
·
Chang-Ing Hsu and Shwu-Ping Guo. Residential location
choice in a n urban area with surface streets and rail transit lines. TRB Annual
Meeting, 1999.
|